หุ่นยนต์เช็ดกระจกสุวรรณภูมิ
-
 17 Jan 2008
17 Jan 2008
-
 6539
6539
ผู้บริหารส่วนงานในกระทรวงอุตสาหกรรมท่านหนึ่งได้โทรหาผมสอบถามถึงความเป็นไปได้ถึงเทคโนโลยีในปัจจุบันสามารถสร้าง "หุ่นยนต์เช็ดกระจก" ที่สนามบินสุวรรณภูมิได้หรือไม่? ผู้บริหารท่านนี้เห็นว่าคงลำบากพอสมควรหากจะใช้คนทำความสะอาด นอกจากนี้ หากมีหุ่นยนต์ไฮเทคเคลื่อนที่ไปมาบนหลังคาที่มีสถาปัตยกรรมล้ำยุคน่าจะกลมกลืนไปกันได้ดี

ระบบหุ่นยนต์เช็ดกระจกนั้นมีอยู่สองระบบใหญ่ๆ ระบบแรกเป็นระบบที่มี Autonomy ในระดับสูง คือสามารถทำงานได้ด้วยตัวมันเอง โดยตั้งโปรแกรมคอมพิวเตอร์ไว้ให้หุ่นยนต์เคลื่อนที่ไปยังพื้นที่ที่เรารู้ล่วงหน้าจากข้อมูลที่สำรวจไว้ หุ่นยนต์จะทำงานแบบ "ตาบอด" เคลื่อนไปตามรางโครงสร้างหรือไต่สลิง ใช้เซนเซอร์คอยตรวจเช็คว่าฟังก์ชั่นต่างๆทำงานไปครบถ้วนแล้วหรือไม่ หรือคำนวณได้ว่าอยู่ในสภาวะอันตรายต้องหยุดการทำงานทันที แล้ว "ใส่เบรค" เพื่อไม่ให้หุ่นยนต์ร่วงหล่นลงจากหลังคา ระบบนี้มีลักษณะเดียวกับหุ่นยนต์อุตสาหกรรมที่ทำงานตามคำสั่งคอมพิวเตอร์ที่บันทึกไว้ล่วงหน้า
การทำงานของหุ่นยนต์แบบ Autonomy ที่บรรดาเหล่านักวิจัยสนใจ จะแตกต่างจากที่ผมกล่าวไว้ข้างต้น หุ่นยนต์จะมีเซนเซอร์นานาชนิดคอยป้อน "ข้อมูล" ให้กับสมองกลบางรุ่นสามารถตัดสินใจว่าพื้นที่สะอาดแล้วไม่ต้องปั่นมอเตอร์ให้สิ้นเปลืองพลังงานไฟฟ้า หรือเมื่อฝนตกลงมาก็สามารถกลับไปหลบยังสถานีของตัวเองได้ พร้อมเช็คระดับความต่างศักย์และพลังงานไฟฟ้าของแบตเตอรี หันเต้าเสียบเพื่อทำการชาร์จไฟฟ้าเองได้
หากออกแบบเป็นลักษณะแมงมุมและใช้ระบบ"สูญญากาศ" ในการยึดเกาะก็จะมีความซับซ้อนเชิงระบบควบคุมมากขึ้นตามความยืดหยุ่นที่สามารถเข้าไปทำความสะอาดยังพื้นที่ต่างๆโดยไม่ต้องวางรางเลื่อนหรือสลิงไว้ล่วงหน้า
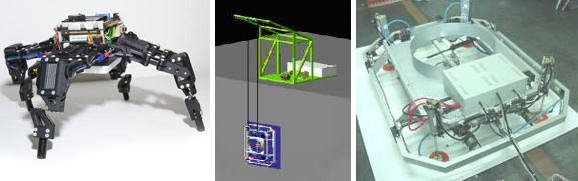
ระบบที่สองเป็นระบบที่ใช้งานจริงตามอาคารสูงทั่วไป ทดแทนระบบเดิมที่ใช้เพียงคนนั่ง-ยืนบนแคร่ห้อยลงมาจากเครนบนยอดตึก คอยทำความสะอาดกระจกส่วนใหญ่ที่อยู่ในแนวดิ่ง เมื่อใช้หุ่นยนต์แทนคนก็ช่วยลดความหวาดเสียวได้พอสมควร การทำงานของหุ่นยนต์ประเภทนี้เป็นแบบกึ่งอัตโนมัติปนกับการควบคุมระยะไกลโดยมนุษย์ (Teleoperator) ที่ สถาบันวิทยาการหุ่นยนต์ภาคสนาม มหาวิทยาลัยเทคโนโลยีพระจอมเกล้าธนบุรี เราได้สร้างต้นแบบหนึ่งของระบบนี้ขึ้นโดยมี ดร.ถวิดา มณีวรรณ์ เป็นหัวหน้าโครงการ และนักศึกษา:นายจตุพล เหลืองชัยศรี, นายวรานนท์ พักตรจันทร์, นายวิฑูร จูวราหะวงศ เราเรียกว่า หุ่นยนต์เคลื่อนที่ในแนวดิ่ง (Vertical Moving Robot) เพื่อที่จะพัฒนาเป็นหุ่นยนต์ทำความสะอาดกระจกบนอาคารสูงต่อไป หุ่นยนต์เคลื่อนที่ในแนวดิ่งประกอบด้วย 2 ส่วนคือ เครนและหุ่นยนต์เครนจะติดตั้งบนตัวอาคารมีหน้าที่รับน้ำหนักทั้งหมดของหุ่นยนต์และช่วยในการเคลื่อนที่ในแนวดิ่งของหุ่นยนต์รวมทั้งช่วยประคองตัวหุ่นยนต์ซึ่งเคลื่อนที่ในแนวระดับบนระนาบของอาคาร

หุ่นยนต์มีส่วนประกอบดังนี้คือ ระบบขับเคลื่อนประกอบดัวย ล้อ 2 ชุด โดยล้อชุดแรกเป็นล้อขับเคลื่อน ช่วยให้หุ่นยนต์สามารถเคลื่อนที่ในแนวระดับบนระนาบอาคารได้ ล้อชุดที่สองเป็นล้อรองรับทำหน้าที่ประคองตัวหุ่นยนต์เมื่อมีการเคลื่อนที่ในแนวดิ่งบนระนาบอาคารล้อทั้งสองชุดจะทำงานผลัดเปลี่ยนกันได้โดยอาศัยกลไกสับเปลี่ยนโดยใช้กระบอกนิวแมติกส์เป็นตัวบังคับกลไกส่วนประกอบที่สำคัญอีกส่วนหนึ่งของหุ่นยนต์คือกลไกในการยึดจับกระจกซึ่งมีหน้าที่ยึดจับกระจกให้หุ่นยนต์หยุดนิ่งอย่างมั่นคงในตำแหน่งที่ต้องการโดยไม่เกิดการลื่นไถลเมื่อมีแรงจากภายนอกมากระทำ เช่น แรงลม แรงที่เกิดจากการเช็ดกระจก เป็นต้น กลไกในการยึดจับกระจกของหุ่นยนต์นั้นอาศัยถ้วยดูดสูญญากาศ (suction cup) ซึ่งทำให้เกิดการยึดเกาะที่แข็งแรง เนื่องจากในการยึดจับกระจกของหุ่นยนต์มักมีปัญหาจากการไม่มีแรงกระทำอย่างต่อเนื่องในแนวตั้งฉากกับพื้นผิว ซึ่งทำให้ส่วนของล้อและถ้วยดูดไม่สามารถสัมผัสพื้นผิวได้อย่างสมบูรณ์หรือเป็นไปอย่างไม่มีประสิทธิภาพ โครงการวิจัยนี้จึงได้เสนอแนวคิดการเพิ่มชุดใบพัดบนตัวหุ่นยนต์ เพื่อสร้างแรงกระทำในแนวตั้งฉากอย่างต่อเนื่อง อันเป็นการเพิ่มประสิทธิภาพของการยึดจับกระจก ขณะหยุดนิ่งและการสร้างแรงเสียดทานระหว่างล้อกับพื้นผิวกระจกขณะเคลื่อนที่ทั้งในแนวระดับและแนวดิ่งสำหรับหุ่นยนต์สำหรับเช็ดกระจกหลังคาโค้งของสนามบินสุวรรณภูมิ คงต้องมีระบบที่ซับซ้อนขึ้นมากกว่าต้นแบบนี้
ขอบคุณ ดร.ชิต เหล่าวัฒนา ผู้เขียนและผู้อนุเคราะห์ข้อมูลเพื่อเผยแพร่ลิงค์ไปที่
http://th.wikipedia.org/wiki/%E0%B8%8A%E0%B8%B4%E0%B8%95_%E0%B9%80%E0%B8%AB%E0%B8%A5%E0%B9%88%E0%B8%B2%E0%B8%A7%E0%B8%B1%E0%B8%92%E0%B8%99%E0%B8%B2